KITTI数据集
KITTI数据集
系统搭建
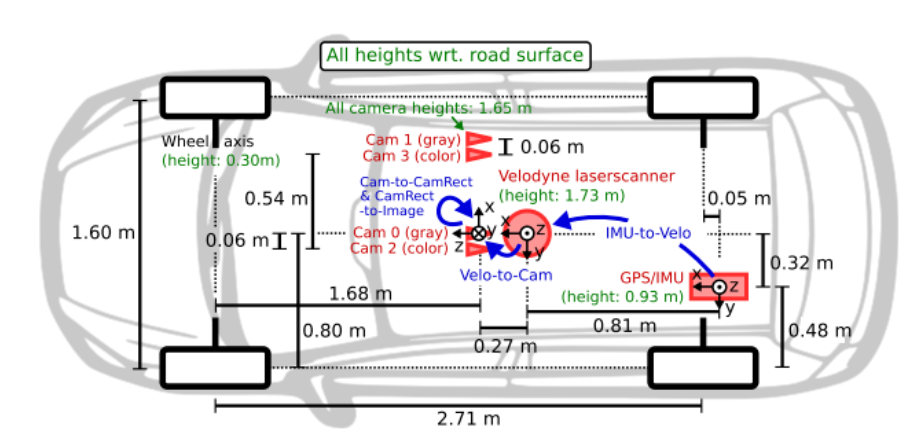
KITTI数据集的数据采集平台装配有2个灰度摄像机,2个彩色摄像机,一个Velodyne 64线3D激光雷达,4个光学镜头,以及1个GPS导航系统
如图-2所示为传感器的配置平面图。为了生成双目立体图像,相同类型的摄像头相距54cm安装。由于彩色摄像机的分辨率和对比度不够好,所以还使用了两个立体灰度摄像机,它和彩色摄像机相距6cm安装。为了方便传感器数据标定,规定坐标系方向如下:
• Camera: x = right, y = down, z = forward
• Velodyne: x = forward, y = left, z = up
• GPS/IMU: x = forward, y = left, z = up
sequence
00-10依次是urban,highway,urban,country,country,country,urban,urban,urban,urban,country
00
房子较多,树较少
03
房子和树1:1
01、02、04
长直马路,路边特征物体少